本文主要内容素材来自Mobile ALOHA项目网站,在此进行翻译和整理,帮助小伙伴们更好地了解如何搭建Mobile ALOHA机器人的硬件平台。
硬件物料清单(Bill of Material)
3D打印件
关于Leader和Follower末端执行器的3D打印件,请参考 ALOHA 🏖️ Tutorial。
下表是关于轮子里程计的3D打印件,共6个零件。
| 轮子(2) | 安装固定件(2) | Housing(2) |
 |  |  |
硬件安装指南
1. 安装ALOHA末端执行器
按照ALOHA Tutorial文档的第一部分为引导臂和从动臂安装末端执行器。同时,为两个从动臂安装手腕摄像头。
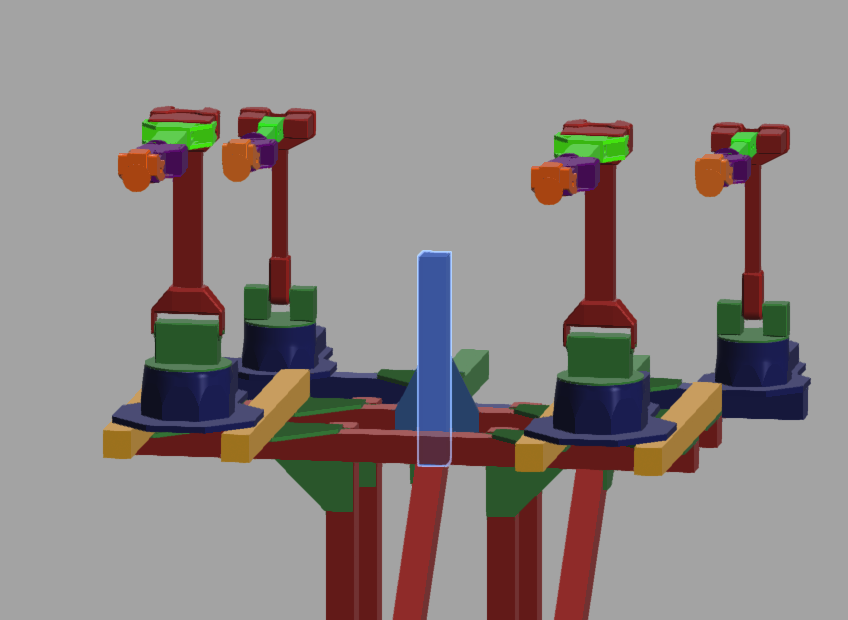
2. 搭建机器人框架
参考CAD文件搭建机器人框架: https://a360.co/47Wn6hp
| 选择“Model Browser” 查看所有的零件清单 | 点击一个零件并选中它 |
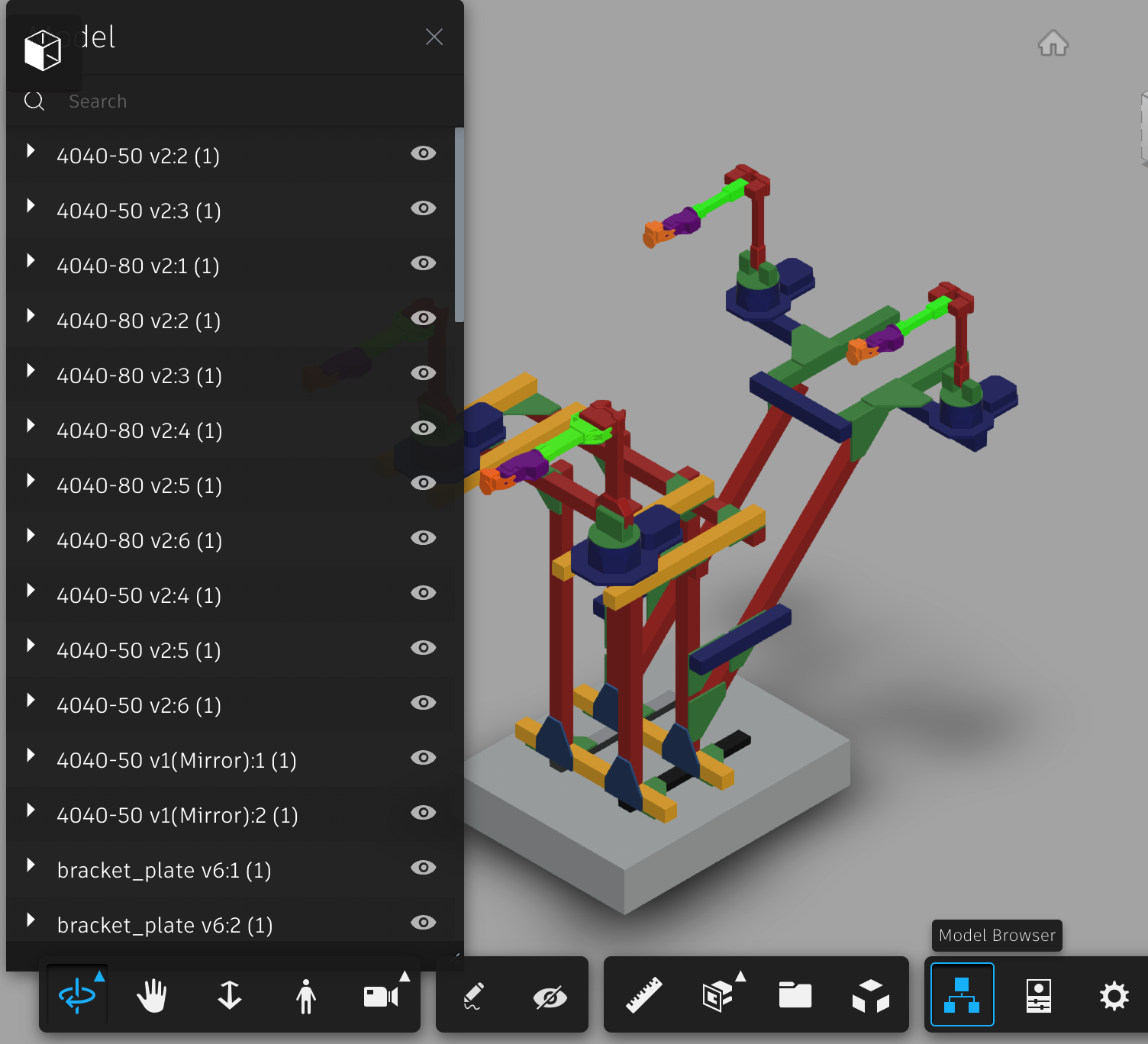 | 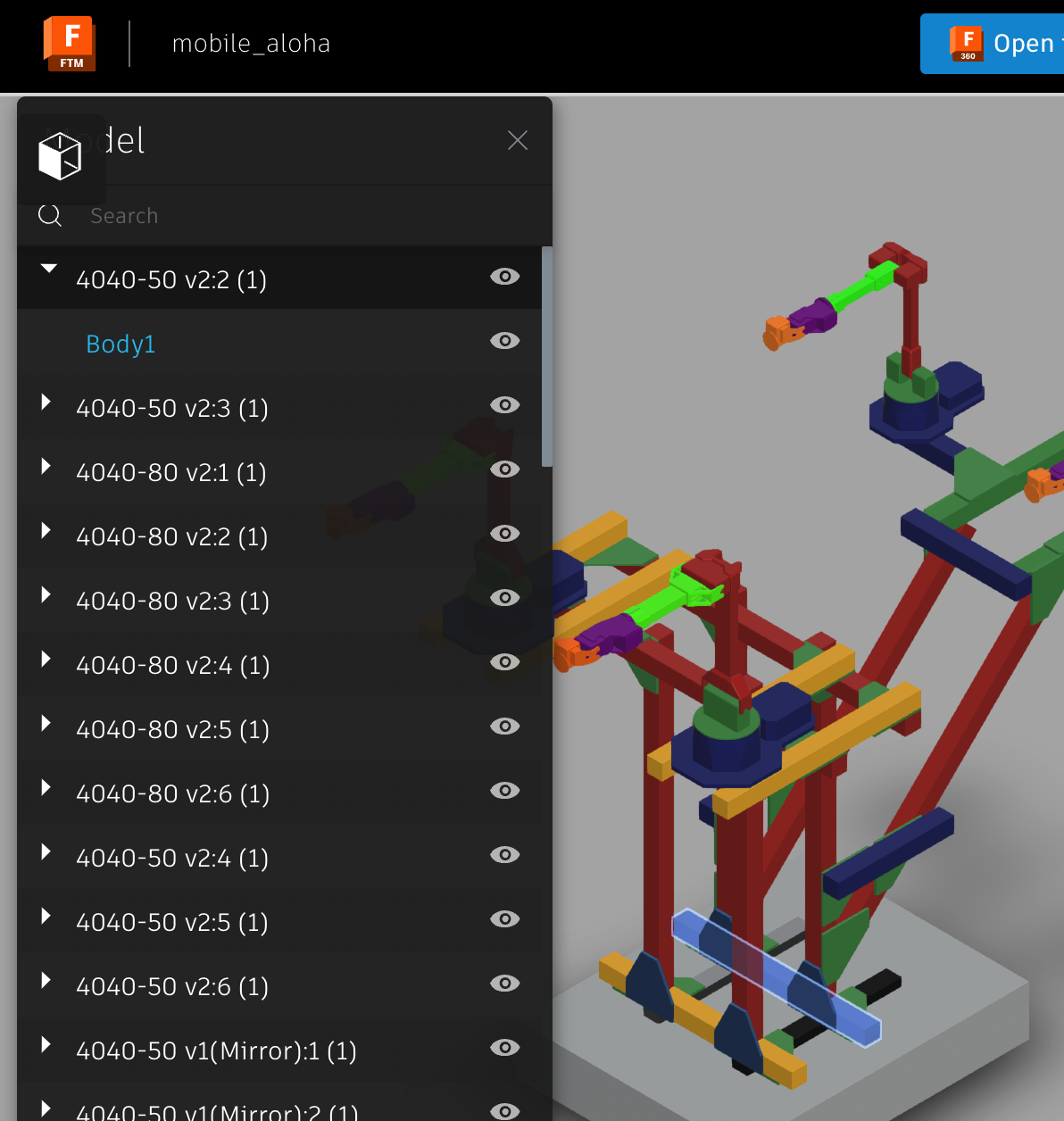 |
4040-50代表一个50cm的梁
3. 安装机器人和摄像头
跟其它的框架不同(其它框架都安装M8螺钉),机器人需要使用M6螺钉安装。
| 安装引导臂 (左) | 安装从动臂 (左) |
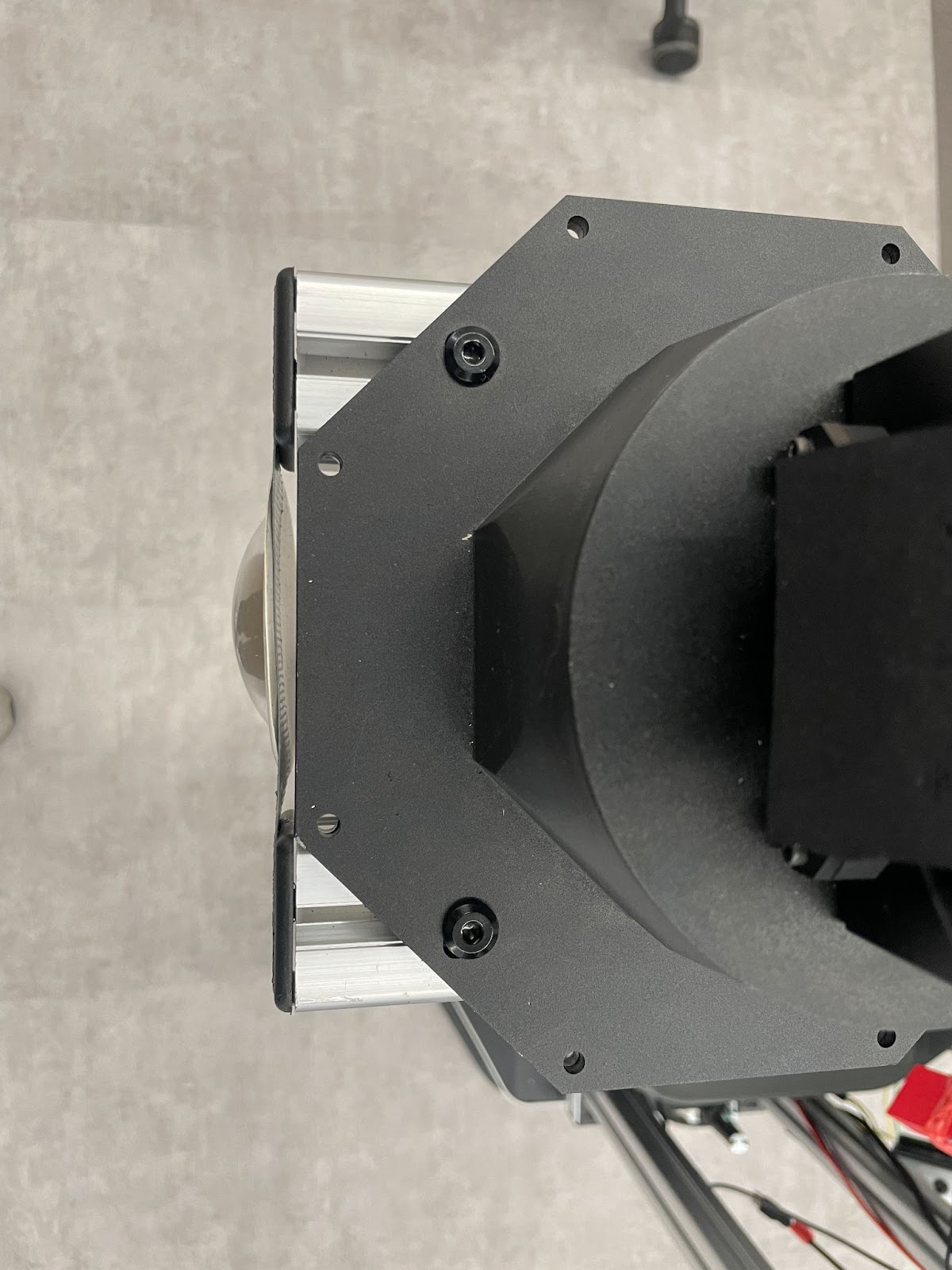 使用6个M6螺钉将机器人固定在框架上。机器人底座的前面和extrusion bars对齐。 | 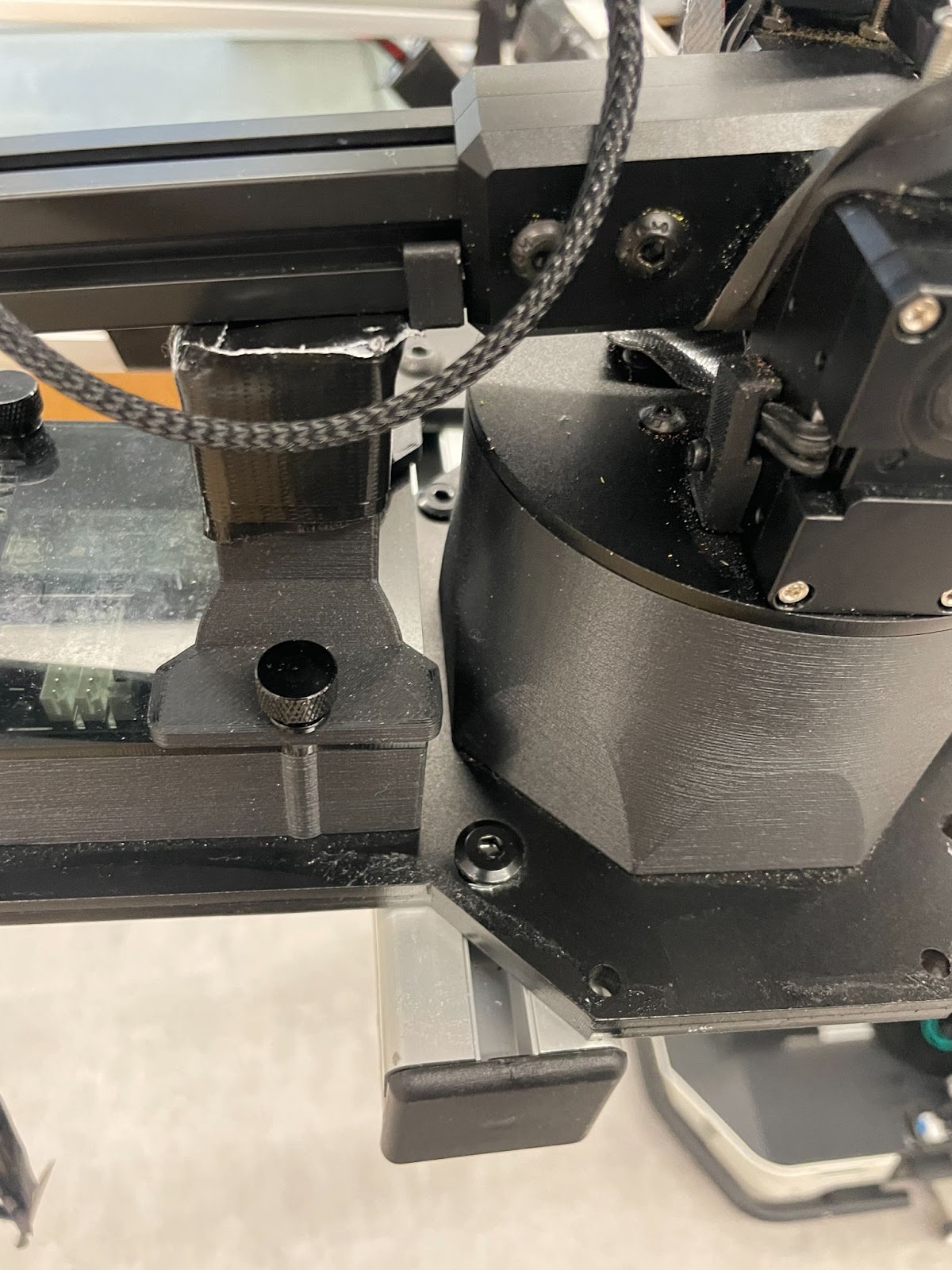 使用2个M6螺钉安装。 |
安装前摄像头时,使用胶带将Logitech webcam固定在梁的顶端,然后用热熔胶固定摄像头的角度。
| 使用到的梁 | 安装示意图 |
 |  |
| 摄像头视角 (前,左,右) |
 |
可选:引导臂的重力补偿
最初的 ALOHA 重力补偿对于移动应用来说太麻烦了。 以下是我们的重新设计(部分灵感来自 GELLO):
| 肩关节 | 肘关节 | 手腕 |
 我们使用 4x M2.5 20mm 螺钉并在其周围缠绕橡皮筋。 注意:螺钉可能会因应力而过度弯曲。 |  肘关节也类似。 |  我们还在腕关节上添加了一根橡皮筋,将其恢复到原来的位置。 这对于防止该关节翻转 180 度非常重要。 |
4. 线缆连结
4.1 电源
将电池组放置在底梁顶部:

要给ALOHA手臂供电,请参考 ALOHA 🏖️ Tutorial,然后将电源直接插入电池组。
另外,将笔记本电脑电源直接插入电池组。
4.2 USB 连接
要将 Tracer Base 连接到笔记本电脑,请使用底座附带的 USB-CAN 总线转换器。
我们使用两个 USB 集线器进行此设置:
- 每个机器人手臂有 4 个 USB,1 个用于 Tracer 底座的 USB,1 个前置摄像头。
- 腕部相机
然后将这两个 USB 集线器分别插入笔记本电脑的左侧和右侧。
此时,您应该能够远程操作引导臂和从动臂。访问mobile-aloha repo完成软件安装,然后运行one_side_teleop.py。
5. 里程计
车轮里程计用于在遥控数据收集期间收集基本速度信息。 我们不能直接使用 Tracer 车轮的读数,因为当通电时,车轮会自动施加扭矩。 因此,除非 AgileX(Tracer 制造商)更新其软件以支持电机的纯读取模式,否则我们需要关闭底座并使用此里程计单元来获取数据。
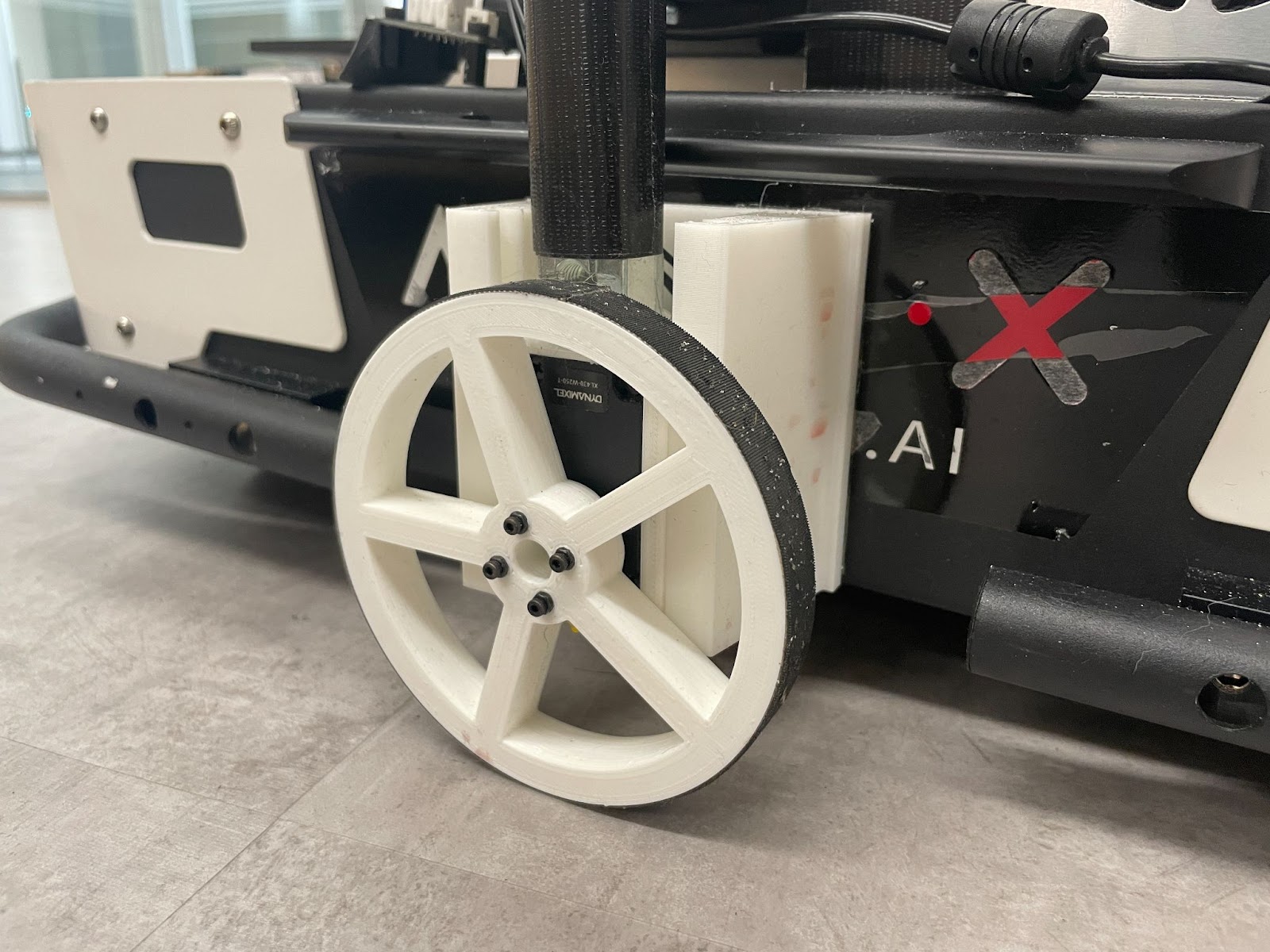
我们需要在底座的两侧安装该装置。 对于每一方,我们需要:
- 1x DYNAMIXEL XL430-W250-T
- 1x 轮子, 1x Mount, 1x Housing (see Mobile ALOHA 🏄 Tutorial)
由于我们纯粹使用 Dynamixels 来读取基本速度(只是作为编码器而不是电机),齿轮的摩擦可能会导致地面之间打滑。 为了减少这种情况,我们将轴与 Dynamixel 内的直流电机断开。
- 参考Dynamixel X-Series Horn Disassembly取出horn。
- Open up the Dynamixel case following参考 [Do It Yourself] DYNAMIXEL Gear Replacement – AX-Series (到0:41)打开Dynamixel case。我们使用的电机与所示的不同,但结构相似。
- 取出最靠近电机轴的齿轮,然后将所有东西放回去。
为了进一步减少车轮与地面之间的打滑,我们使用胶带包裹车轮,并在外壳顶部增加重量。
将电机连接到笔记本电脑:
- 使用电机附带的电缆和跳线将两个电机连接到 U2D2 电源集线器板组。
- 将 U2D2 电源集线器板组连接到 U2D2
- 直接用USB连接U2D2到笔记本电脑
- 将另一根 12V 直流电缆添加到 12V 电源并将其插入 U2D2 电源集线器板组
最后,按照 Mobile ALOHA repo中的教程设置两个电机。
您现在可以使用 Mobile ALOHA 🏄!
本文参考链接:Mobile ALOHA 🏄 Tutorial
文中引用到的3D打印文件,Youtube视频等,需要合适的网路环境才能访问。后续我会下载到本地然后再更新此文档。